Muutaman vuoden ajan on mielessä pyörinyt ajatus vene-elektroniikan päivittämisestä nykyaikaan.

Alkukaudesta hommasimme veneeseen Humminbirdin viistoluotainkombon mutta jossain vaiheessa kautta alkoi tuntua ettei laite tunnu ihan omalta, veneissämme on ollut yli kymmenen kauden ajan Lowrancen elektroniikkaa ja tottumus niiden käytettävyyteen oli näköjään pinttynyt jo liiän syvälle. Näinpä päätimme myydä Humminbirdin pois ja palata Lowrancen pariin, tällä kertaa uudempaan sukupolveen. Laitteiksi valikoitui HDS 7 Gen3, HDS 12m Gen2T ja Lowrancen autopilotti, antureiksi tulivat Lowrancen oma viistoanturi ja Airmarin valmistama Chirp-anturi. Tämän lisäksi takanäytöltä tulee wifin kautta kuva iPadille ohjaamoon, iPadin kautta pystyy myös käyttämään takatilan laitetta joten käytänössä ohjaamossa on kaksi täysiveristä laitetta. Laitteet laitetaan nmea2000 ja ethernet verkkoon joten kaikki toiminnot ovat käytettävissä kummallakin näytöllä. Aikaisempi Lowrancen kombo oli Lcx-112c joten päivitystä tuli muutama sukupolvi ja ominasuuksia sen myötä kourallinen lisää.

Lisäksi Navionicsilta tuli uusi ominaisuus missä minkä tahansa valmistajan laitteiden luotausdatat voi lähettää palvelimelle ja niistä täydennetään sonar chartsien dataa. Aikaisemmin kartanteko-ohjelmat ovat olleet merkkikohtaisia eikä eri merkeillä kerättyä dataa ole voitu hyödyntää samassa kartassa. Näin ollen saamme hyödynnettyä myös aikaisemmat nauhoitusdatat läppärin lisäksi myös plotterissa.

Näytöt menivät helposti paikoilleen ja sähköjen ja muiden kaapeleiden veto meni jo rutiinilla. Takanäytön paikaksi valikoitui yläkaaren keskikohta oven yläpuolelta, totesimme tämän toimivammaksi kuin takakaiteen. Siellä näyttö on paremmin suojassa lialta mutta on kumminkin hyvin näkyvillä. Plottereiden käyttöönotto sujui helposti ja vanhat jäljet ja reittipisteet edellisestä Lowrancesta siirtyivät muistikortilla suoraan uuteen. Myöskin uudet ohjelmistopäivitykset ajoimme laitteisiin heti sisään, vanhemmissa versioissa ei ollut vielä tukea autopilotin ohjaamiseen.

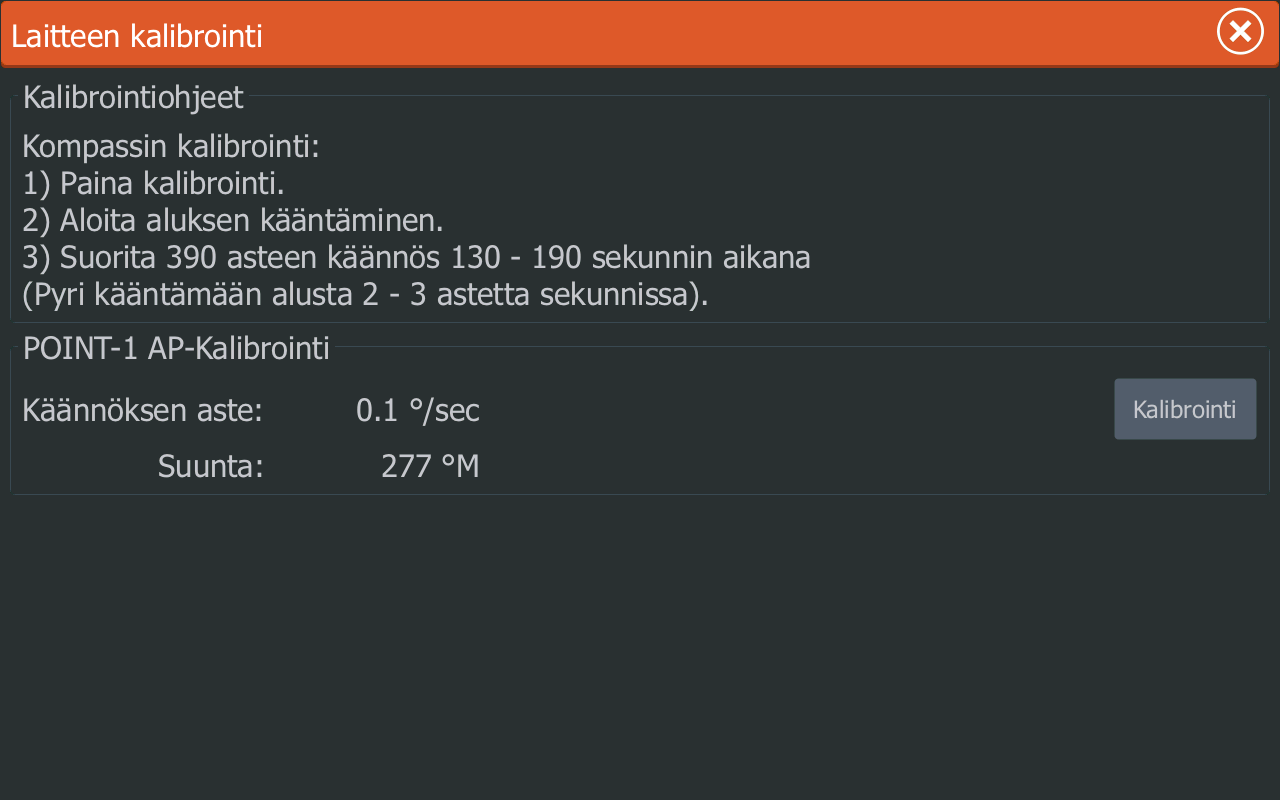
Alussa suurin mietityksen aihe oli pilotin asennus ja järjestelmän ilmaaminen, saimme pumpun menemään samoihin letkuihin kuin edellinen raymarinen pumppu, väliin tarvitsi vain yhdet sovittimet, näin letkut pystyivät olemaan entisellään. Ilmauskin sujui alkupohdintojen jälkeen helposti. Autopilotin mukana tulevan Point-1 antennin paikkaa emme ole vielä lopullisesti päättäneet, tällä hetkellä anturi on teipillä kiinni ohjauspulpetissa plotterin etupuolella. Pilotissa on vain yksi fyysinen nappi, auto/standby -kytkin, tällä kytketään autopilotti joko pois päältä tai pitämään keulan osoittaman kurssin. Pilotin asennukseen ja käyttöönottoon löytyi lowrancelta hyvät videot. Käyttöönotossa aluksi moottori keskitetään jonka jälkeen sitä käännellään ohjeiden mukaan, näin pilotin aivot rekisteröivät moottorin liikelaajuuden ja osaavat määrittää sille oikeat komennot. Point-1 anturin kalibroinnissa pitää ajaa järvellä ympyrä mahdollisimman tyynessä kelissä, näytölle tulevat ohjearvot käännökselle ja tarvittava info mistä voi seurata että pysyy ohjearvojen sisällä. Tämän jälkeen pilotti on valmis täysiveriseen käyttöön!
Tällä hetkellä takatilan Hds7 ei ole kytkettynä nmea2000 verkkoon, näin olleen sille ei tule autopilotin tietoja. Ongelmalliseksi näytön ollessa verkossa koitui se että pilotin ajaessa reittiä, pisteelle saavuttaessa ponnahtaa aina esille autopilotin kontrolleri. Pienessä näytössä se vie paljon tilaa ja ohjaamosta padin näytöltä käsin sitä ei voi sulkea koska padi menee lukittuun tilaan pilotin kontrollerinäytön ollessa näkyvillä. Jos pilotin ohjaimen ottaa näytölle valmiiseen pohjaan näkymään silloin tätä ongelmaa ei ole mutta se vie kuitenkin tilaa näytöltä. Käytön edetessä asiaan tulee varmasti enemmän selkoa. Laitteista tulossa enemmän käyttökokemuksia kunhan niitä alkaa kertyä.
– Antti